Itseään ajavien autojen tekniikka hioutuu koko ajan paremmaksi. Jotta auto lopulta pystyy ohjaamaan itseään, sen on nähtävä paremmin ympärilleen kuin sitä tähän asti kuljettaneen ihmisten.
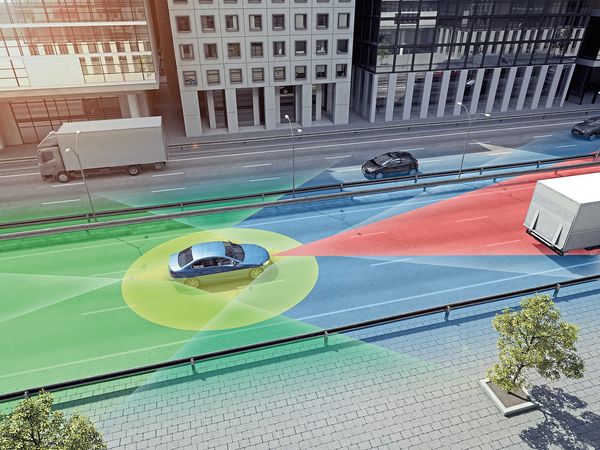
Jotta auto näkee ympärilleen paremmin kuin ihminen, se tarvitsee tähän enemmän silmiä kuin mitä ihmisellä on. Myös kuuloaistista on hyötyä. Tutkien, kameroiden sekä muiden sensoreiden avulla jo nykyautot näkevät ympärilleen 360 astetta. Näin autot tunnistavat toiset autot, jalankulkijat, pyöräilijät, kaistaviivat, tiekaiteet – oikeastaan kaikki ne elementit, joita se voi tien päällä kohdata.
Näkemänsä perusteella auto tekee jo nyt päätöksiä. Jos kaistavahti on kytketty päälle, auto ohjaa tarvittaessa kevyesti itseään, jotta se pysyy kaistojen välissä. Tämä on näppärää etenkin monikaistaisella ja melko suoralla moottoritiellä. Mutkateille kaistavahti ei vielä taivu. Tarvittaessa auto myös jarruttaa itsensä pysähdyksiin kaupunkinopeuksissa, jos se havaitsee tiellä esteen – esimerkiksi autojen välistä ajoväylälle pomppaavan ihmisen. Onnettomuusriski vähenee, sillä auton reagointiaika yllättäviin liikennetilanteisiin on lyhyempi kuin ihmisellä.
Turvallisuuden lisäksi sensorit tekevät ajamisesta myös mukavampaa. Jos ratin takana ei istu kokenut pysäköijä, auto laittaa itsensä nätisti taskuparkkiin jo melko ahtaisiin väleihin. BMW:n 7-sarja tekee tämän jopa avaimeen integroidun kaukosäätimen avulla ilman että autossa on enää kukaan sisällä. Myös älykäs vakionopeudensäädin on näppärä varuste, se pitää automaattisesti halutun etäisyyden edellä ajaviin eli kiihdyttää tai jarruttaa auton vauhtia tarpeen mukaan.
Mutta miten tämä kaikki tapahtuu? Ihminen tekee päätöksiä liikenteessä sekä havaintojensa että kokemuksensa perusteella. Tekoäly on tärkeä tutkimuskohde tietokoneiden kehityksessä, eli joskus tulevaisuudessa auto toivottavasti pystyy jopa itse oppimaan asioita. Toistaiseksi tietokoneen “äly” perustuu kuitenkin valmiisiin ohjelmiin. Jokainen liikennetilanne pitää siis erikseen opettaa tietokoneelle. Samoin auton järjestelmille pitää kertoa aina erikseen, mitä niiden kulloisessakin tilanteessa pitää tehdä. Tähän tarvittavien laskutoimitusten ja parametrien viidakko on valtava.
Tässä tullaan itseään ajavan auton kohdalla siihen kaikkein kriittisimpään kysymykseen. Toimiiko auton ohjelma paremmin kuin sitä ohjaava ihminen? Varmasti sekä että. Yksi etu tietokoneella on kuitenkin puolellaan: se ei ole koskaan väsynyt ja sen valppaus on aina 100-prosenttinen – kunhan sensorit vain toimivat ja näkevät riittävästi ympärilleen.
Autossa on monenlaisia sensoreita. Pysäköinnissä tukeudutaan esimerkiksi päänsääntöisesti kuuloaistiin eli ultraäänisensoreihin. Tutkien avulla tehdään puolestaan päätöksiä liikennetilanteista. Lähitutkat toimivat etäisyysvälillä 50 sentistä 50 metriin. Pidemmän etäisyyden tutkat näkevät puolestaan jopa 250 metriin asti. Ne myös pystyvät arvioimaan erittäin tarkasti muiden tiellä liikkuvien nopeudet – tai pikemminkin niiden nopeuserot auton omaan nopeuteen nähden. Vieläkin tarkempia mittatietoja antaa laserskanneri.